☎ 400-1399-168
为先进制造提供最有价值的解决方案
为先进制造提供最有价值的解决方案
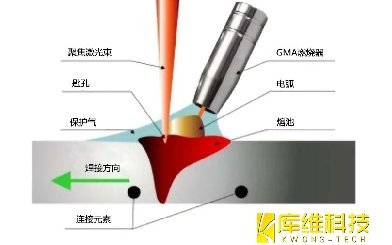
激光电弧复合焊(LAHW)作为一种先进的焊接技术,在工业制造领域,特别是船舶制造行业中备受瞩目。该技术融合了激光焊与电弧焊的优势,能够在提升焊...
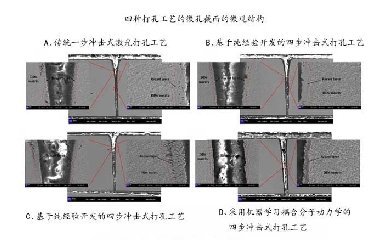
激光打孔工艺在现代制造业中至关重要,但其参数优化一直是一个复杂的挑战。传统的试错法不仅耗时,而且成本高昂,因此亟需寻找更高效的优化方法。...
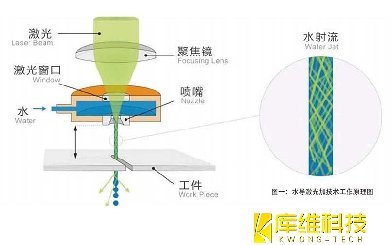
传统的激光加工技术因其非接触性、可控性强和高精度等特点,在金刚石加工中展现出独特的优势。近年来,为了满足金刚石等透明硬质材料的加工 需求,...

在水导激光加工中,光学元器件的长期稳定性是一个关键问题。正确认识并解决这个问题,能够提高加工质量,保证产品的可靠性和稳定性。本文将为您介...

焊接是制造业中不可或缺的工艺,而焊缝跟踪技术则是实现高效、精确焊接自动化的关键。焊缝跟踪技术是一种实现焊接自动化和智能化的关键技术,它通...
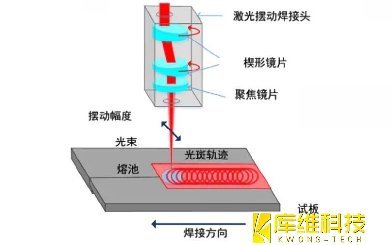
激光作为一种先进的加工工具,在工业焊接领域发挥越来越重要的作用。传统的激光焊接技术虽然在一定程度上能够控制这些缺陷,但其效果往往受限于固...

在现代制造业中,激光加工技术已经成为一种重要的加工手段,尤其是超快激光加工技术,以其高精度和高效率而受到广泛关注。本文将深入探讨超快激光...

水导激光技术凭借其独特优势,已成为应对这些挑战的佳选,能够有效地进行各种战略新兴领域中半导体材料、陶瓷、金刚石、热障涂层、硬质合金和复合...